
ATTENTION HR, HIRING DIRECTORS, and TEAM LEADERS!
Available for Work! Operations Engineer and Drilling Fluids Specialist

My name is Doug Walters, and for the past 15 years I’ve been working in various engineering fields such as:
- Oil and Gas Well Construction (Drilling Fluids)
- Environmental Waste Treatment (Fryer grease and Port-o-lets)
- Construction (Compressor Pads)
- Flood Protection (FloodBreak)
- Heat Loss Prevention (Heat Tracing)
- Welding Engineering
I’m a hands-on builder at heart—cooking, programming, CAD, mechanics, and 3D printing are my favorite ways to stay curious and create. I also spend a fair amount of time watching Veritasium and going down scientific rabbit holes when not designing new automations for the backyard chicken club.
I graduated from Texas A&M in 2014 and started out as a TIG welder in Lake Jackson, Texas. From there, I stepped into design work as a Heat Tracing Designer at Pentair in Houston. Within three years I found my way into the oilfield, like my father and his father before that. Over the years I’ve been collecting as much diverse engineering experience as possible and creating real products with new tools such as OnShape, Blender, Claude Code, 3D Scanning, Solar Power, Power Generation and much more.
Open to New Opportunities – F.E. Passed, P.E Registered
I’m a multidisciplinary engineer with 15 years of experience across engineering, field operations/consulting, design, planning/scheduling, and technical sales leadership. I’m currently pursuing Professional Engineer (PE) licensure and plan to sit for the Thermal & Fluid Systems exam in Q4 2026.
I’m exploring roles in:
Automation & Robotics
Industrial / Manufacturing
Tech (hardware, systems, product)
Solar & Renewables
Environmental
Aerospace / Defense
While the majority of my experience is managing field operations on-site, I believe it’s time to step away and pursue other careers which offer the ability to work locally and be home with my family.
My professional experience over the past decade has been in roles such as :
Technical Sales Manager
Senior Operations Planner
Drilling Fluids Professional
Environmental Project Manager – Black/FOG/Non-Hazardous Waste
Heat Trace Designer
Welding, operating lathes, multi-axis machines and manufacturing on shop floors.
I’ve been hired directly, consulted, or supported projects for organizations including Halliburton, Shell, Chevron, ConocoPhillips, Archrock, Pentair, and Westlake, among others.
If you’re hiring for roles in engineering, field engineering, applications, project engineering, or technical/program management, I’d love to connect.
Request my resume using the form below, and I’ll send it over.
"Send me a Resume!"
If you think my experience may be a fit for your team and would like to see my current resume – please tell me here!
| Hobby Portfolio, Current Projects, Past Work, Dreams… |
Mechanics and Robotics
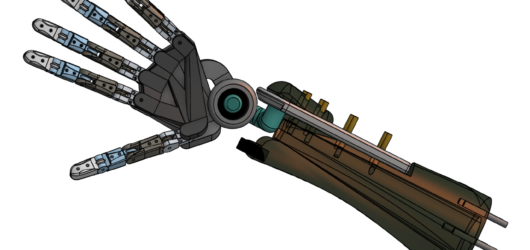
My journey into robotics began with the chicken feeder operating system. I’m continuing by making the moving links “human shaped” now because the mechanics + controls are mesmerizing. I am spending most of my time on gear reduction because off-the-shelf actuators are wildly expensive.
Many BLDC and QDD motors for robotics cost $500+ each and still barely meet the performance I want. So I design custom FDM gearboxes tailored to each joint, using affordable parts that can take real world abuse.
The goal: sub-$50 motors, a mostly 3D-printed autonomous arm, and a 25 lb lift capacity.
Explore my 24:1 3D-printable cycloidal reducer (files, BOM, tolerances, assembly guide, and design tips) here.
Manufacturing and 3D Design
I’ve been using CAD for 20 years, beginning with self taught training in high school, formal training in college, and professional use in industry.
- Developed custom circuit boards tailored for automation controls, high-end user interface/experience, sensor integration, battery charging, and solar compatibility.
- Complete design for manufacturing of 2-4 layer printed circuit boards, housings and enclosures, structural and mechanical parts, and rotating equipment using OnShape, KiCad, and Blender.
- Check out my free and paid STL files HERE.
Programming and Software Engineering
Over the past 12 years, I have managed drilling fluids operations for a total of 34,560 hours and built roughly 215,000 bbl of drilling fluid. Being successful in drilling fluids requires a deep understanding of hydraulics, drilling mechanics, geology, and chemistry. Even today operators make high impact decisions based on rule of thumb and gut feelings. Sometimes there are better options.

Around 12 months ago, I built Flow, a desktop hydraulics and engineering toolset to calculate surge/swab pressures, estimate cuttings bed locations, perform ECD calculations, simulate sweep efficacy, and make drilling fluid and operational recommendations.
Building Flow allowed me to sharpen my python skills and implement sleek user-interfaces with high-end engineering simulations.
Check out some of my DIY backyard chicken coop automations on YouTube @BrokenPrototypes.
ARCTICLES, PROJECTS, AND MORE.
Drawing Lines Between Drilling Fluids Systems and other Industries.
One neat thing about drilling fluids, is that most of the materials we use to make “mud” are also found in other industries – doing very similar jobs. Such examples like xanthan gum, carbomethyl-cellulose, sodium acid pyrophosphate and many more can be found in store bought tortillas, body lotion, and premium grade drilling fluid. Enter Segway.
Sometime shortly after my daughter, Zoe, was born – we began experimenting with custom skincare and “safe” alternatives to big-brand bathroom products. This gave me a chance to learn fluid systems with a newly found motivation. Long story short the mud lab conceded spaced to the “cosmetic formulary”, but the science is remarkably similar.
Check out all of my research backed formulas for skincare such as “CryoFrese” PolyGel – a crystal clear Biofreeze Dupe –which I spent literal weeks dialing in. My wife spent a lot of time with the stretch mark belly serum, and everyone loves Dad’s Luxury Leather Lotion.
If you are interested in drilling fluid chemicals and how they are used in other industries like cosmetics, pharmaceuticals or waste processing – CLICK HERE to read my article about Cross-Industry Chemicals.

ClukWorx Smart Feeder – A Battery Powered Animal Feed Control System
You’ve probably never seen a chicken feeder quite like this. Meet the ClukWorx Smart Feeder—a touchscreen feed control system I built with three goals in mind: automating the messiest part of the morning, sleeping in on the weekends, and making sure my pregnant wife doesn’t have to step into the coop when I’m away.
I used to manage a rare-breed poultry farm, and learned fast that daily chores can mean late nights, early mornings, and extra help anytime you leave town. I travel a lot for work, and that responsibility was landing on her—so I decided to build a real solution.
This is a FULLY AUTOMATIC battery powered grain dispenser fit for the most luxurious livestock. ALL structural components are 3D-printed using food safe AND weather resistant materials. No need for injection molding.
You can purchase a unit in the store HERE if, like me, you appreciate Saturday mornings and weekend’s away. I’ve had one running in my coop non-stop for just over 6-months without any issues or time-loss!

ClukWorx Veronoi Door – Automated Door Control System with Ultrasonic Sensor
I’d been meaning to build an automated coop door for years – and I finally did it! Like my SmartFeeder, this coop door has a touchscreen for simplicity and 3D printed electronics housing to keep all the magic smoke generators tucked away neatly (since we are in a humid and yet somehow dusty environment). This door is printed from PETG – so flexibility and water resistance will be on our side during the next hurricane. Most coop doors are fairly inexpensive and utilize an overhead linear motion similar to a guillotine to open and close; but something about that design just didn’t sit right with me. I’m really happy with the final outcome and it kind of gives me Space-Suit Gandalf vibes. The door control system is powered from a 12V marine fuse box, setup to distribute any low voltage power needed generated by our coop roof solar panels to the various automations and lights in the coop. Inside the touchscreen housing is an additional 5 V bus to power the screen, sensor, and a future electro-magnetic lock of my own creation.
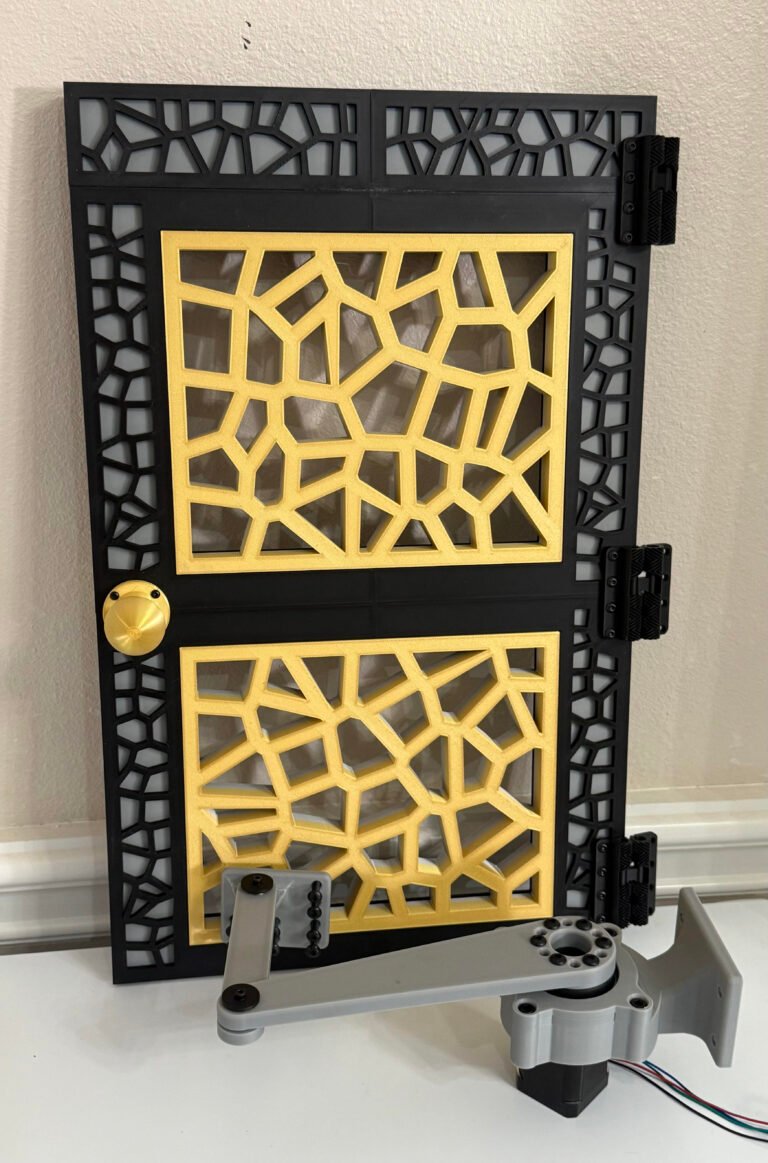
After spending some time in CAD on various designs, I kept daydreaming about a swinging door – a fancy one with a “stained glass” vibe and color scheme to match the coop. Our opening for the hens is approximately 24″ tall and 13.5″ wide – meaning a door to fit this opening would take at least 6 prints on the X1Carbon with a 10″ print bed width. Breaking it into multiple pieces, ensuring it is sturdy and level, and making it look good is going to be a challenge. Using the veronoi pattern tool, we were able to come up with a pretty slick design for our “screens” and we will use mounting holes to help bind each of the two sides for the top and bottom. Stainless steel dowel rods and 4mm hex bolts hold the (8) frame pieces in place to allow for an extremely sturdy multi-piece print.
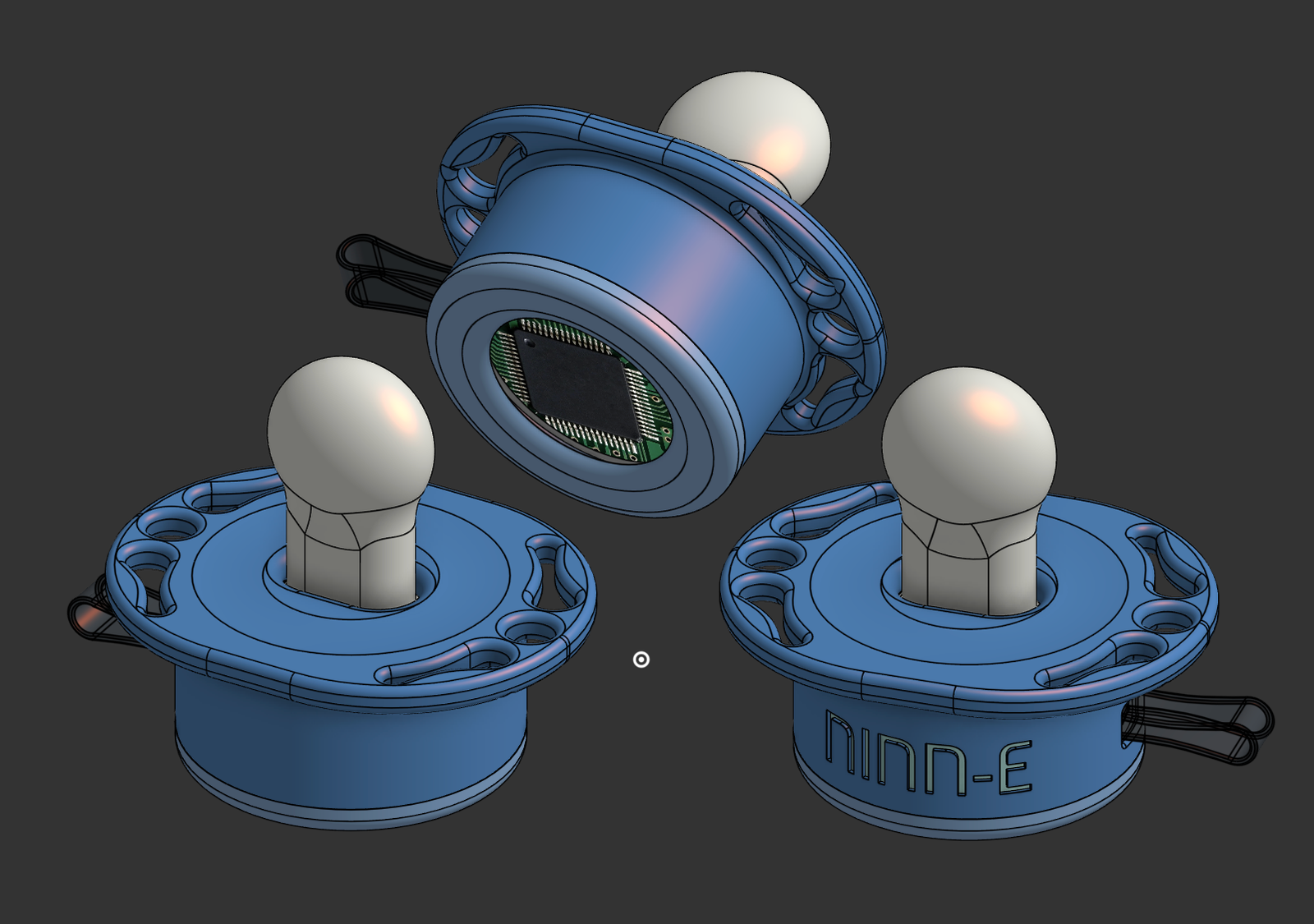
The door opener itself uses a Nema-17 (0.8Nm) driven by a DRV8825 set to 50% of its limit without forced cooling (Vref 0.5V ~ 1A). The 5mm motor shaft spins an eccentric cam driving two cycloidal disks inside the single phase 20:1 gear reducer. Essentially we have a 4 bar linkage driving a door panel with the links being: Coop Wall/Casing, Crank Arm, Coupler Link, and a Door Rocker. To minimize torque loss, we should to attempt to push the door from close with the coupler making a right angle with the crank and goal of having the crank and coupler just shy of parallel when the door is at 90 degrees with the threshold. Finding the length of the arm and coupler will just take some simple trigonometry rather than inverse kinematics – so we will skip the math tangent this time.
At 5AM the door opens to release the fowl, and stays open until 10PM. At that time the door initiates a closing sequence – pinging the ultrasound module (HC-SR04) via the TRIG pin, and reading responses via the ECHO pin. We convert these to distances – and then check against our threshold width (13.5″). If there is any distance measurement shy of 13.5″ – this likely means we have an obstacle in the range of the ultrasound. Often times the ECHO pin will go high even without an obstacle if there are fault connections or a voltage drop – so I wrote a filtering algorithm to ensure an “obstacle” is measured at least 20 times in a row before an alert is issued (which isn’t hard or dangerous at a 60 microsecond ping rate). If the ultrasound picks anything up during a closing sequence, the DRV8825 DIRECTION pin will reverse polarity and move our door back to a fully open position to re-initiate a closing sequence after a 5 second pause – giving a chicken enough time to get through and live another day. Given this is essentially just a clock driven motor – timekeeping is critical, so we aren’t going to do it for more than 24 hours. The ESP32 Touchscreen connects to our home WIFI daily to update time via nist.gov, and will alert my phone if there are any door jams, disconnections, or ultrasound faults.
This design is not public, but you can message me for 3D print files if you’re interested. If you’re interested in setting up simple but effective user interfaces on the 4″ CYD, check for the full C+ code file in the portfolio section.